 400 025 3599
400 025 3599 




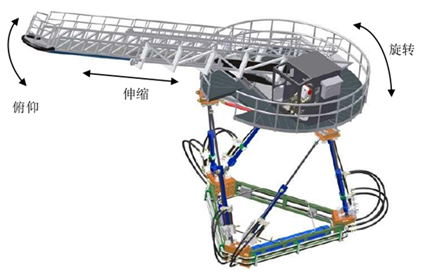
本文采用的Stewart并聯(lián)機器人平臺如圖1所示,主要包含上平臺、下平臺以及六個支桿。其中六個支桿的兩端采用上、下兩個臥式虎克鉸將上、下平臺連接在一起。每個支桿均采用電動缸,通過控制電動缸的中伺服電機實現(xiàn)支桿的長度控制,進而實現(xiàn)Stewart并聯(lián)機器人末端位姿的調整。

由上可知,Stewart并聯(lián)機器人具有上平臺、下平臺和6個支桿組成,為了便于描述,將機器人抽象為如圖2所示的結構簡圖,該圖中將上平臺臥式虎克鉸的回轉中心定義為Ai(i=1,2,…,6),分布在半徑為Ra的圓周上,六個上平臺臥式虎克鉸的回轉中心點連線組成了一個六邊形。以此類推,將下平臺臥式虎克鉸的回轉中心定義為Bi(i=1,2,…,6),分布在半徑為Rb的圓周上,六個下平臺臥式虎克鉸的回轉中心點連線也組成了一個六邊形。序號對應的回轉中心進行連線,分別代表電動缸的長度Li(i=1,2,…,6),此長度包含電動缸的本體長度。

為了描述Stewart并聯(lián)機器人的結構,目前主要包含兩種描述參數。
第一類結構描述參數如下:
(1)上平臺臥式虎克鉸回轉中心點分布圓半徑Ra;
(2)下平臺臥式虎克鉸回轉中心點分布圓半徑Rb;
(3)上平臺臥式虎克鉸回轉中心點的六邊形短邊長度Da;
(4)下平臺臥式虎克鉸回轉中心點的六邊形短邊長度Db;
(5)上平臺工作零位時,上、下平臺臥式虎克鉸回轉中心點距離L。
第二類結構描述參數如下:
(1)上平臺臥式虎克鉸回轉中心點分布圓半徑Ra;
(2)下平臺臥式虎克鉸回轉中心點分布圓半徑Rb;
(3)上平臺臥式虎克鉸回轉中心點的六邊形短邊中心角φa;
(4)下平臺臥式虎克鉸回轉中心點的六邊形短邊中心角φb;
(5)上、下平臺臥式虎克鉸回轉中心點的最短距離Lmin。
以上兩種結構描述參數均采用五參數,其中前四個參數描述的物理意義相同,區(qū)別在于第五個參數的定義,一種時以實際的工作狀態(tài)定義,一種是以機器人的物理結構定義。本文采用第二種結構描述參數,圖1中的Stewart并聯(lián)機器人的結構描述參數如表2.1所示。根據以上定義可以計算得到上平臺臥式虎克鉸的回轉中心點Ai(i=1,2,…,6),下平臺臥式虎克鉸的回轉中心點Bi(i=1,2,…,6)的坐標如下式所示。







 在線咨詢
在線咨詢 




